


SeaOrbiter est à la fois un projet de « vaisseau d’exploration des océans » et un « laboratoire océanographique flottant » dirigé par l’architecte français Jacques Rougerie, l’océanographe Jacques Piccard et le spationaute Jean-Loup Chrétien. La construction du vaisseau a débuté fin 2014. La construction de l’œil de la station à été achevée en décembre 2016, et le planning de la mise à l’eau d’un premier prototype est prévue en 2020.
Partie émergée
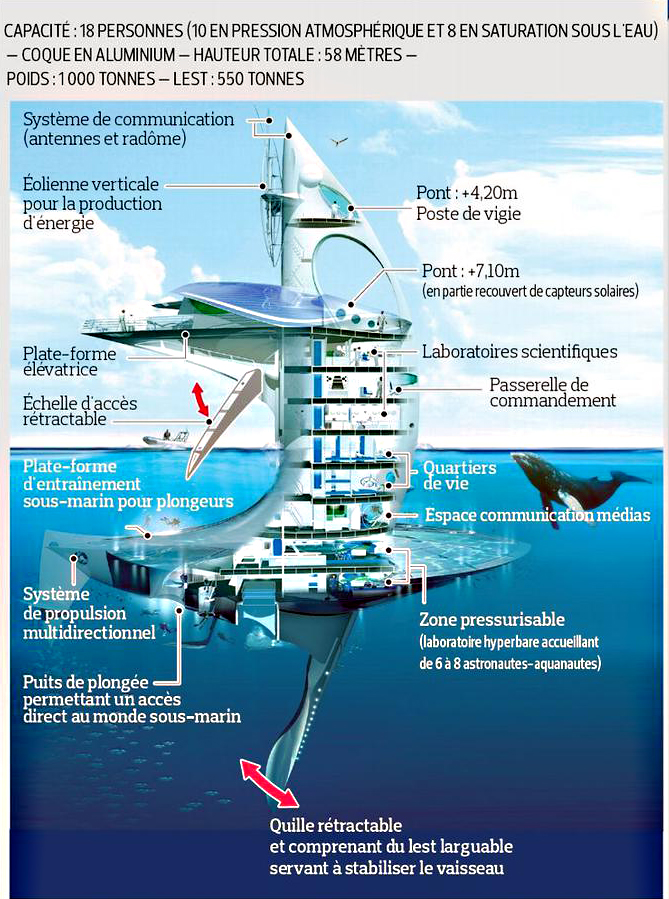
La partie émergée est composée de 6 ponts, pour un tirant d’air total de 27 mètres. Au sommet du « navire » se trouve un système de communication où se situent antennes et radômes. C’est aussi dans cette partie que sont localisés une éolienne pour la production d’énergie du vaisseau, ainsi que le panneau solaire de 350 m2. Le pont extérieur est équipé de deux grues de manutention et d’une plateforme pour plongeurs où l’échelle de coupée permet d’atteindre la mer, ainsi que l’embarquement et le débarquement de passagers ou marchandises.
Partie immergée
La partie immergée est composée de 6 ponts pour un tirant d’eau total de 31 mètres. Il comporte un sas plongeur, un hangar sous-marin, une quille relevable d’un poids de 180 tonnes et un propulseur de poupe.
Mode de propulsion
Le vaisseau est conçu pour dériver au gré des courants, avec pour seul moteur la circulation océanique et de ce fait a une dimension « développement durable à 100% ». Il utilisera également deux éoliennes, 340 m2 de panneaux solaires, des hélices sous-marines et du biofuel afin de produire l’énergie nécessaire à son fonctionnement.
Les deux petites hélices sont prévues afin de permettre au SeaOrbiter de modifier sa trajectoire et de manœuvrer dans les canaux de Suez et de Panama ainsi que dans les ports.
Source : seaorbiter.com / wikipedia